Uživatelské nástroje
Toto je starší verze dokumentu!
Obsah
Dekodér Gen2 příkazů RFID čtečky
Zadanie
Realizujte dekodér signálu PIE vysílaného z UHF RFID čtečky podle protokolu EPCglobal Class-1 Generation-2. Dekodér by měl přes virtuální sériový port vypsat např. hodnotu Tari, RTcal, TRcal, obsah příkazu Query.
Hardware
Dekodér signálu PIE je realizovaný na vývojovom kite KL25Z. K splneniu účelu postačuje využiť jeden vstupný pin a USB rozhranie. Digitálny signál PIE generuje iný vývojový kit osadený mikrokontrolérom ATmega16. Po stalčení tlačítka mikrokontrolér vyšle data kódované podľa protokolu Gen2.

Protokol Gen2
Podľa protokolu zahajuje komunikáciu vždy čítačka a to odoslaním Preambuly a následne príkazu Query. Následne čítačka čaká na odpoveď tagu. Ďaľšie príkazy začína čítačka vždy sekvenciou Frame-Sync. 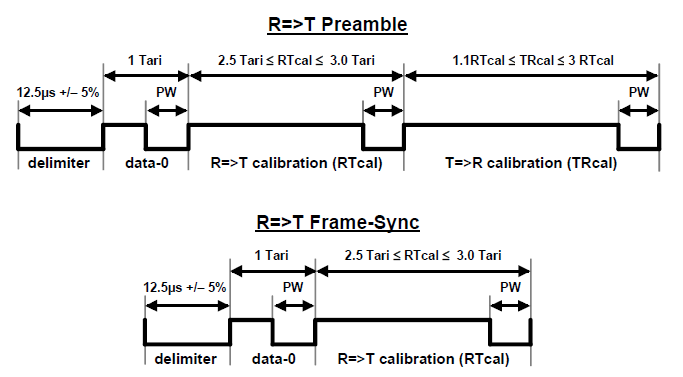
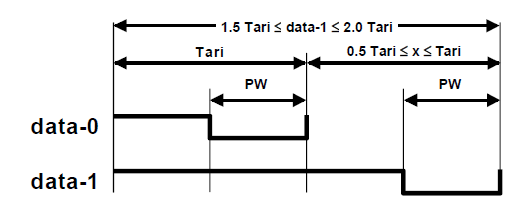
Obsah príkazov tvoria datové 1 a datové 0, kódované podľa nasledujúceho obrázku.
Problém s meraním krátkych pulzov
Maximálna bitová rýchlosť komunikácie v smere od čítačky k tagu je podľa protokolu 128 kbps. Spracovať tento signál procesorom Cortex M0 by na prvý pohľad nemal byť problém. Avšak po rozsiahlých pokusoch a sa nepodarilo merať šírku impulzov, ktoré sú široké rádovo 10-ky us, s dostatočnou presnosťou. Program písaný v prostredí MBED vnášal do čítača chybu okolo 30us, čo znemožňuje merať presné hodnoty impulzov. To je spôsobené pravdepodobne vývojovým prostredím MBED na takúto aplikáciu nie je vhodné, alebo nevhodne napísaným kódom s nedostatočnou optimalizáciou. Riešením tohoto problému je zväčšenie šasových intervalov 1000 násobne. Tým vznikne datový signál s šírkou impulzov 10-ky ms, namisto us, ktoré sú v protokole. Princípy komunikácie sú však zachované.
Software
Signál z čítačky
Mikroprocesor ATmega 16 osadený vo vývojovom kite bol naprogramovaný tak, aby po stlačení tlačítka odoslal sekvenciu Preambula + Query + 200ms pauza + Frame-Sync + ACK. Preambula obsahuje delimiter=12,5ms, tari=6,25ms, RTcal=18ms, TRcal=15ms. Obsah príkazov bol zvolený následovne:
//...................delimiter, tari , RTcal, TRcal, //----------------------______-----___-----__-----___ float preamble[DLZKA]= {12.5 , 3.25, 3, 15, 3, 12, 3}; float query[DLZKA_Q]={1,0,0,0,1,0,0,1,0,0,0,1,0,1,1,1,1,0,0,0,0,1}; float ack[DLZKA_D]={0,1,1,0,1,0,1,1,0,0,1,1,0,0,0,0,1,1};
Sekvencia Preambuly a príkazu Query je vyslaná nasledovne:
--------Preamble------------------------------------ for(i=0; i<DLZKA; i++){ PORTD ^= _BV(PD4); _delay_ms(preamble[i]); } //--------Prikaz Query------------------------------------ for(i=0; i<DLZKA_Q; i++){ if(query[i]){ //kodovanie bitovej 1 podla protokolu Gen2 PORTD ^= _BV(PD4); _delay_ms(6.5); PORTD ^= _BV(PD4); _delay_ms(3); } else{ //kodovanie bitovej 0 podla protokolu Gen2 PORTD ^= _BV(PD4); _delay_ms(3.25); PORTD ^= _BV(PD4); _delay_ms(3); } } PORTD |= _BV(PD4); //cas na odpoved tagu _delay_ms(200);
Dekodér
Základom dekodéru je časovač v kombinácií s prerušeniami na nábežnú a dobežnú hranu. Prerušenie na dobežnú hranu je aktívne len ak dekodér očakáva delimiter(Preambula alebo Frame-Sync). Po prijatí delimiteru je aktívne už len prerušenie na nábežnú hranu, pričom časovač meria intervaly medzi nábežnými hranami. Obsluha prerušení pre nábežnú a dobežnú hranu:
void Counter_rise(){ //obsluha prerušenia nábežnou hranou _time.stop(); count = _time.read_us(); _time.reset(); _time.start(); i++; } void Counter_fall(){ //obsluha prerušenia dobežnou hranou(len pre detekciu delimiteru) _time.reset(); _time.start(); interrupt.fall(NULL); //zakázanie prerušenia dobežnou hranou .. }
Hlavný program:
int main() { pc.printf("Ready to read!\n"); interrupt.rise(&Counter_rise); interrupt.fall(&Counter_fall); while (true) { if (_time.read_us() > 300000){ //ak 300 ms neprebieha komunikacia, tag sa nastaví na defaultné hodnoty _time.stop(); _time.reset(); R2T_started = false; FS_expected= false; i=0; interrupt.fall(&Counter_fall); } if((_time.read_us() > (2*TRcal)) && (TRcal>0) && R2T_started){ //činnosť tagu medzi prikazmi z čítačky if(FS_expected==0){ //ak sa jedna o prvý príkaz resp. Query pc.printf("Preamble: delimiter:%d, tari:%d, RTcal:%d, TRcal:%d \n", delimiter, tari, RTcal, TRcal); pc.printf("Query: "); for(uint8_t j=0 ; j<=(i-5); j++){ pc.printf("%d ",data[j]); } } else{ //ostatne prikazy pc.printf("Frame sync: delimiter:%d, tari:%d, RTcal:%d \n", delimiter, tari, RTcal); pc.printf("Command: "); for(uint8_t j=0 ; j<=(i-4); j++){ pc.printf("%d ",data[j]); } } pc.printf("\n "); i=0; interrupt.fall(&Counter_fall); FS_expected=true; //po prvom prikaze s preambulou už bude tag očakavať na začiatku príkazov Frame-Sync R2T_started = false; //ukončenie prikazu } if ((count>12000) && (count<13000)){ //testovanie delimiteru R2T_started = true; //začiatok prikazu(preambuly alebo FS) delimiter = count; } if(R2T_started && (FS_expected==0)){ //uloženie parametrov preambuly a nasledujúceho príkazu = Query if(i==2) tari= count;ie if(i==3) RTcal= count; if(i==4) TRcal= count; if(i>4){ if((count>(tari-250)) && (count<(tari+250))) data[i-5]=0; if((count>(1.5*tari)) && (count<(2*tari))) //tolerancia z protokolu data[i-5]=1; } } if(R2T_started && (FS_expected)){ ////uloženie parametrov Frame-Sync a nasledujúceho príkazu if(i==2) tari= count; if(i==3) RTcal= count; if(i>3){ if((count>(tari-250)) && (count<(tari+250))) data[i-4]=0; if((count>(1.5*tari)) && (count<(2*tari))) data[i-4]=1; } } } }
Výsledky
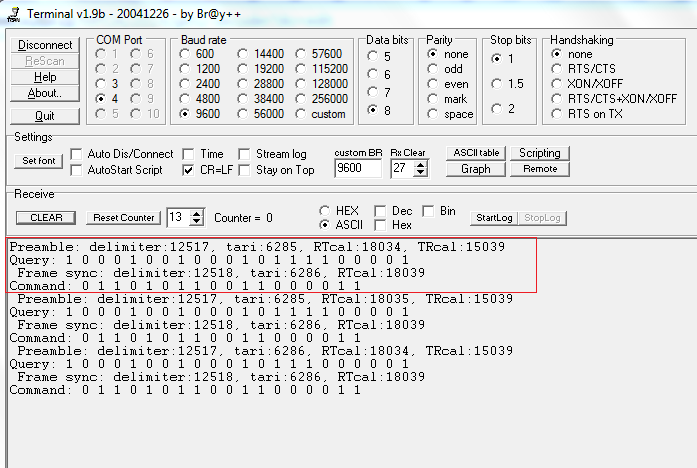
Výstupom z dekodéru je odoslanie dekódovanej sekvencie príkazov cez virtuálny port a zobrazenie cez terminál. Zaznamenanie dekódovaného signálu PIE je nasledujúcom obrázku. Testovacia sekvencia bola odoslaná 3 krát.
Záver
Podarilo sa naprogramovať dekodér základných príkazov vysielaných RFID čítačkou smerom k tagu. Dodržané boli princípy protokolu Gen2, avšak časové intervaly testovacej sekvencie museli byť zväčšené 1000x. Tam kde majú byť podľa protokolu mikrosekundami tak tento dekodér pracuje s milisekundami. To z dôvodu popísaného kapitole Problém s meraním krátkych pulzov. Výsledkom je dekodér, ktorý síce dodržiava princípy komunikácie podľa protokolu Gen2 ale reálne nepoužiteľný, keďže nedokáže merať impulzy so šírkov rádovo desiatok mikrosekúnd. Z testovacej sekvencie dekodér dekóduje obsah preambuly- delimiter, tari, RTcal, TRcal a nasledujúci príkaz Query. Ďalej dekóduje Frame-Sync- delimiter, tari, RTcal a ľubovoľný nasledujúci príkaz.