Uživatelské nástroje
Toto je starší verze dokumentu!
Řízení pixel light controller kitu
- Pavel Kostelník
- xkoste07@stud.feec.vutbr.cz
Zadání
Pomocí mikroprocesoru LPC407x zprostředkujte komunikaci mezi PC, proudovým zdrojem a integrovaným obvodem pixel light controller. Dále implementujte ukázkové funkce pro pixel light controller (wiping blinker, dark zone, …). Využijte plánovač (RTOS).
Úvod
Tento projekt vychází z aktuálně řešené diplomové práce na téma Řízení maticového světlometu s LED diodami. Cílem této práce je úprava programu v mikroprocesoru tak, aby bylo dosaženo větší univerzálnosti, lepšího časování a přidání některých dalších funkcí. Jedná se o úpravu již funkčního programu, který pracuje jako velká nekonečná smyčka, do podoby pro využití operačního systému reálného času (RTOS).
Hardware
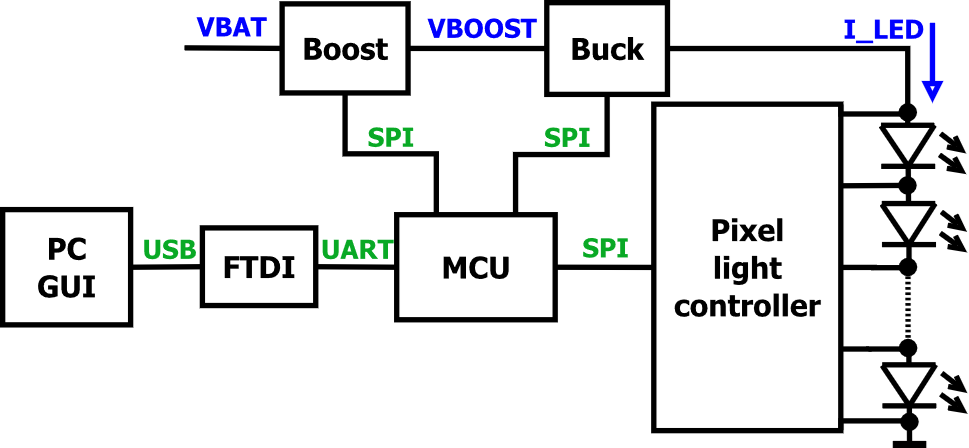
Projekt využívá hardwarové prostředky, které byly vytvořeny v rámci diplomové práce. Konkrétně se jedná o takzvaný evaluační kit. Jeho blokové schéma je možné vidět na obrázku:
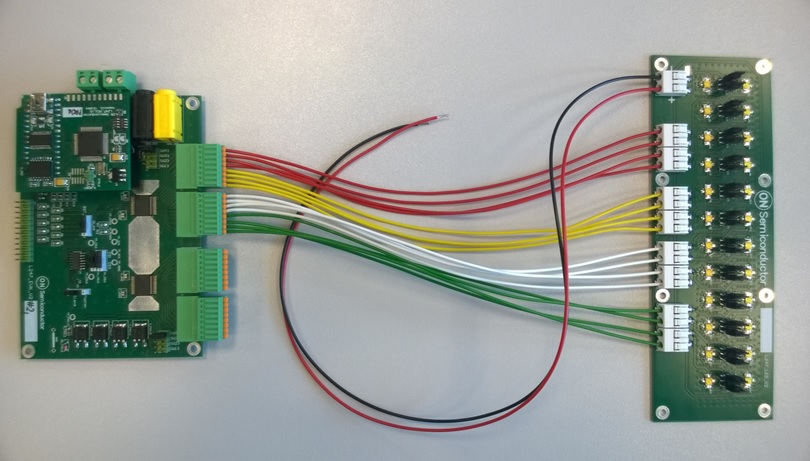
Výsledná realizace je zachycena na následující fotografii.
Software
Knihovna LPCOpen
Práce stávajícího programu s periferiemi je řešena na úrovni registrů. Přímé použití registrů u procesoru LPC není příliš velký problém, protože příručka (User guide) a datasheet, dodávaný k těmto procesorům, jsou psány vcelku přehledně a srozumitelně, přesto v rámci úprav stávajícího programu bylo uvažováno o použití knihovny LPCOpen, která je oficiálně vydávaná výrobcem mikroprocesoru NXP. Balík LPCopen podporuje několik vývojových prostředí, v rámci toho také mnou použitý Keil uVision. Knihovna pro projekt se skládá ze dvou části – část pro mikroprocesor (lpc_chip) a část pro použitou desku (lpc_board). Každá z obou částí obsahuje vlastní projekt pro Keil uVision, kde jsou různé provázané zdrojové soubory, které obsahují všechny funkce, které knihovna obsahuje. Ty je možné upravit, a po sestavení projektu vznikne soubor *.lib. Oba soubory lpc_chip.lib a lpc_board.lib je třeba přidat do vlastního projektu. Knihovnu pro procesor je možné použít z výchozího stavu, knihovnu pro desku je třeba vždy upravit podle aktuálně použité desky. Větší problém tvoří horší dokumentace k těmto knihovnám a minimum ukázkových projektů, jeden příklad ke každé periferii, s nejistou funkčností. Vzhledem k těmto problémům bylo nakonec od použití knihovny LPCOpen upuštěno, zachováno řešení práce na úrovni registrů a věnování větší pozornosti operačnímu systému reálného času.
Operační systém reálného času RTX
Z důvodu větší univerzálnosti bylo rozhodnuto o použití operačního systému reálného času. Byly uvažovány dva, konkrétně známý FreeRTOS a RTX, dodávaný spolu s vývojovým prostředím Keil uVision 5. Nakonec se jako největší problém ukázal vybraný mikrokontrolér, který není přímo podporovaný systémem FreeRTOS, proto byl vybrán druhý jmenovaný – RTX. Systém RTX je preemptivní operační systém, což znamená, že přepnutí tasků vyvolává samotný systém a nevyžaduje kooperaci s běžícími tasky, které by se musely vzdát běhu. RTX má na stránkách www.keil.com vcelku obsáhlou podporu, skládající se z obecného popisu, popisu všech funkcí a pár ukázkových příkladů. Systém RTX je třeba nastavit v samotném vývojovém prostředí a poté i ve zdrojovém souboru. Nastavení systému se nachází v souboru RTX_Conf_CM.c. Zde je možno například nastavit:
Nastavení systému se nachází v souboru RTX_Conf_CM.c. Zde je možno například nastavit:
- Maximální počet současně běžících funkcí (12)
- Velikost zásobníku funkcí (512 B)
- Kontrola přetečení zásobníku (Ano)
- Použitý Tick timer (Core SysTick)
- Konfigurace přepínání (Round-Robin)
- Chybové funkce
Základní použité funkce systému RTX:
- os_sys_init() - iniciace operačního systému
- os_tsk_create() - vytvoření tasku
- os_tsk_delete() - smazání tasku
- os_sem_init() – iniciace semaforu
- os_sem_send() – nastavení semaforu
- os_sem_wait() – čekání na semafor
- os_mut_init() – iniciace mutexu
- os_mut_release() – vzdání se mutexu
- os_mut_wait() – čekání na volný mutex
- os_dly_wait() – uspání tasku na daný čas
Vlastní realizace softwaru
Program pro mikroprocesor je napsán v jazyce C ve vývojovém prostředí Keil uVision 5. Základem programu je operační systém reálného času RTX, který je pro zjednodušení provozován v konfiguraci Round – Robin, což znamená, že všechny tasky mají stejnou prioritu a k přepínání tasků dochází cyklicky. Perioda přepínání je nastavena na 1 ms.
Znázornění celkové funkce programu je znázorněna na následujícím obrázku.
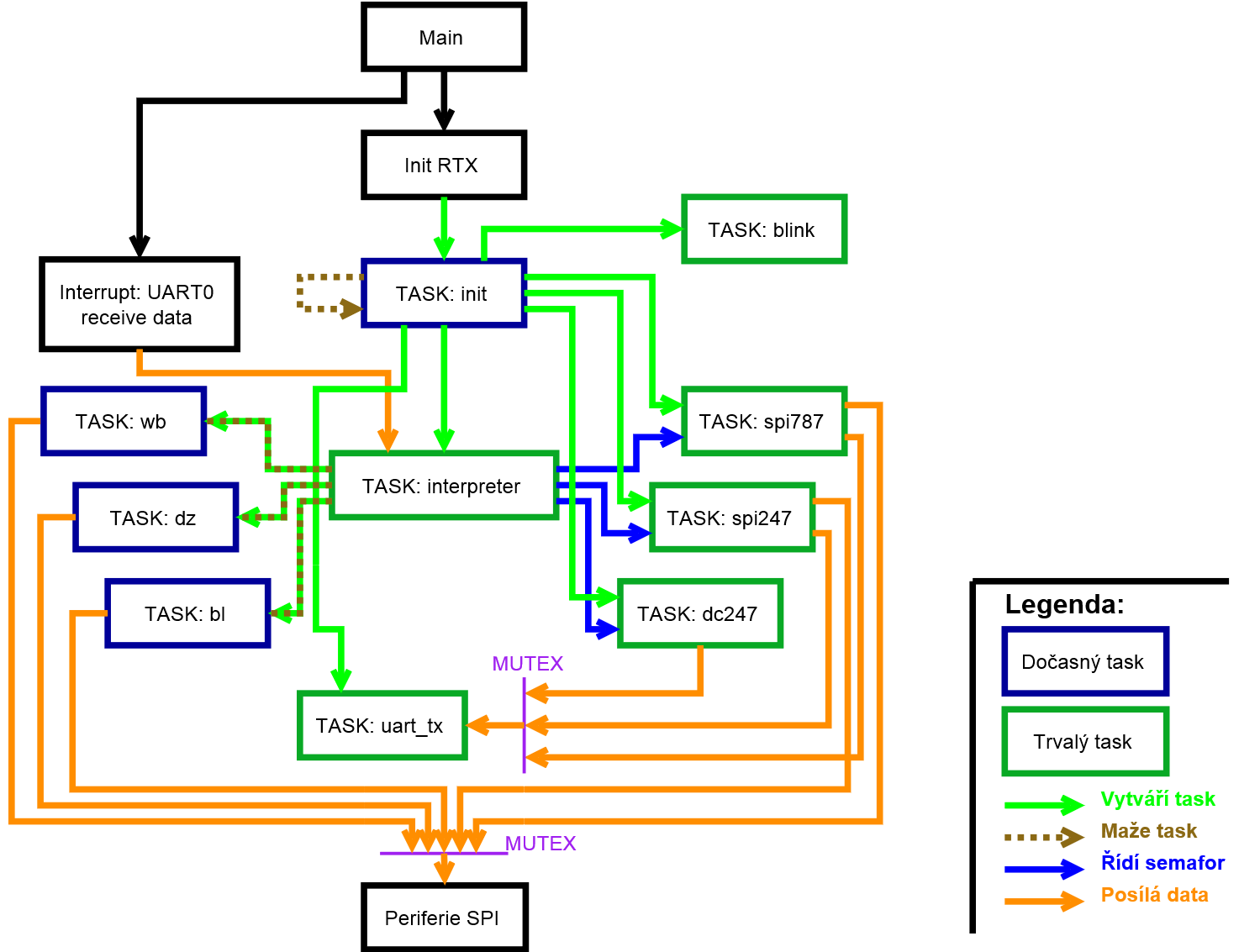
TASK: init
Po startu programu programu ve funkci main dojde k inicializaci systému RTX, nastavení periferií a povolení přerušení od periferie UART0 při příjmu dat. Následně je spuštěn dočasný inicializační task, ve kterém jsou spuštěny všechny trvalé tasky, inicializovány semafory a mutexy. Po provedení těchto operací se inicializační task sám smaže. Kód tasku je pro ukázku uveden zde:
//------------------------- TASK: init -- (Begin) -------------------------------- // iniciation task, start other task __task void init (void) { // create tasks: t_blink = os_tsk_create(blink, 0); t_uart_tx = os_tsk_create(uart_tx, 0); t_interpreter = os_tsk_create(interpreter, 0); t_spi247 = os_tsk_create(spi247, 0); t_spi787 = os_tsk_create(spi787, 0); t_dc247 = os_tsk_create(dc247, 0); // init semaphores: os_sem_init (&Semspi247, 0); os_sem_init (&Semspi787, 0); os_sem_init (&Semdc247, 0); // init mutexes os_mut_init(&Mutspi247); os_mut_init(&Mutspi787); os_mut_init(&Mutuart_tx); //delete itself: os_tsk_delete_self (); } //------------------------- TASK: init -- (End) ----------------------------------
TASK: blink
Při obvyklém běhu programu je spuštěno 6 tasků, z nichž dva běží neustále – task blink a interpreter, ostatní trvalé tasky čekají na semafor. Task blink pouze bliká jednou LED diodou na desce s periodou 1 s pro signalizaci běhu programu. Kód tasku je pro ukázku uveden zde:
//-------------------------- TASK: blink -- (Begin) --------------------------------- // Blinking with LED D5 __task void blink (void) { while(1) { LED_off(5); // turn off LED5 os_dly_wait (500); // wait for 500 ms LED_on(5); // turn on LED5 os_dly_wait (500); // wait for 500 ms } } //-------------------------- TASK: blink -- (End) ----------------------------------
TASK: interpreter, spi787, spi247, dc247
Task interpreter přebírá přijatá data po lince UART z počítače a dále je třídí na základě požadované operace, případně danou operaci sám provede. Například pokud je požadována operace komunikace po SPI s obvodem zdroje, task interpreter pošle data do příslušného bufferu a zašle semafor tasku spi787, kterého tím odblokuje, a task spi787 vykoná příkaz, který mu byl předán příslušným bufferem. Po vykonání příkazu task spi787 odešle výsledná data do počítače přes UART linku tím, že přepošle data tasku uart_tx, který se postará o jejich korektní odeslání.
TASK: wb, dz, bl
Dále software obsahuje tři dočasné tasky, které se vytváří a mažou dynamicky v případě, že je daný efekt potřeba. Například pokud přijde z počítače povel pro efekt Dark Zone, task interpreter vytvoří nový task dz, který se už sám stará o odesílání příslušných dat do SPI periferie. Task s efektem se maže opět příkazem z počítače. V jednu chvíli je možné mít spuštěných i více kopií stejného tasku, které obsluhují různé obvody integrovaného budiče. Ukázka jednoho tasku je uvedena zde:
//-------------------------- TASK: wb -- (Begin) ---------------------------------- // LED effect - Wiping blinker __task void wb (void) { uint8_t target = newtarget; // target device float wb_dt = 0; // time difference while(1) { wb_dt = (float)(wb_stop[target] - wb_start[target])/12.0; if (wb_counter[target] >= wb_per[target]) // counter overflow wb_counter[target] = 0; else wb_counter[target]++; // increment counter if (wb_counter[target] < wb_start[target]) // all LEDs OFF { for (i=0; i<12; i++) { DCs[i] = 1023; } j=0; } else if (wb_counter[target] < wb_stop[target]) //all LEDs dimmed { for (i=0; i<12; i++) { if (wb_counter[target] < (wb_start[target] + i*wb_dt)) DCs[i] = 1023; else if (wb_counter[target] < (wb_start[target] + (i+1)*wb_dt)) DCs[i] = (wb_start[target] + (i+1)*wb_dt - wb_counter[target])/wb_dt*1023; else DCs[i] = 0; } } else // all LEDs ON { for (i=0; i<12; i++) { DCs[i] = 0; } } dimming(DCs, LEDcount, ON, OFF, TR, lastLevel[target]); // ON, OFF, TR values computation using Dimming algorithm os_mut_wait(&Mutspi247, 0xFFFF); // wait for mutex SPI_SendFrame(target + 3, 1, 0xCF, 0, 0, 0); // send SPI frame to pixel light while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData = (LPC_SSP2->DR)<<16; // shift received data while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData += LPC_SSP2->DR; // sum received data SPI_SendFrame(target + 3, 1, 0xCC, ((SPI_RcvData)&(0xFB)), (SPI_RcvData>>8)&0xFF, (SPI_RcvData>>16)&0xFF); while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData = (LPC_SSP2->DR)<<16; // shift received data while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData += LPC_SSP2->DR; // sum received data for(i=0; i<12; i++) // send ON, OFF and TR values to pixel light { SPI_SendFrame(target + 3, 1, i + 0xC0, ((OFF[i]<<4)+TR[i])&0xFF, ((ON[i]<<6)+(OFF[i]>>4))&0xFF, (ON[i]>>2)&0xFF); while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData = (LPC_SSP2->DR)<<16; // shift received data while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData += LPC_SSP2->DR; // sum received data } SPI_SendFrame(target + 3, 1, 0xCC, ((SPI_RcvData)&0xFF)|(1<<2), (SPI_RcvData>>8)&0xFF, (SPI_RcvData>>16)&0xFF); //set MAPENA bit while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData = (LPC_SSP2->DR)<<16; // shift received data while ((LPC_SSP2->SR & 0x4)== 0x0){} // wait until frame is received SPI_RcvData += LPC_SSP2->DR; // sum received data os_mut_release(&Mutspi247); // release mutex os_dly_wait(20); } // end while(1) } //--------------------------- TASK: wb -- (End) -----------------------------------
Návrh na úpravy
Operační systém reálného času RTX je komplexní a velmi rozsáhlý nástroj, proto bez větších zkušeností je velký problém využít všechny jeho možnosti a vytvořit dobře optimalizovaný program. Taky proto byl kladen důraz na jednoduchost a využití pouze základních možností RTX, aby nedošlo k zamotání do různých funkcí a možností. Mezi další možnosti, které systém RTX podporuje, jsou mailboxy, signály a události, tak by jistě stálo za zvážení, zda by programu pomohly.
Ukázka funkce
Závěr
Naprogramovaný software je plně funkční, což je možné vidět i na ukázkovém videu níže. Nastavené časové údaje u ukázkových funkcí odpovídají skutečnosti, a proto je možné tvrdit, že časování v RTOS funguje podle požadavků. V softwaru je navíc implementovaná kontrola přetečení zásobníků jednotlivých tasků. Při testování softwaru bylo ověřeno, že aktuálně nastavená hodnota velikosti zásobníků 512 B je dostatečná.